

































MEMS惯性传感器的误差分析与补偿
惯性传感器是惯性导航系统的核心组成,其精度决定了惯性导航系统的精度,所以惯性导航系统的一项主要工作就是将惯性传感器误差进行补偿。提高惯性导航系统精度的手段大致有以下两种,第一种是从工艺上提高惯性传感器的精度,但是此方法技术难度大,且对于加工条件、材料等要求高;第二种就是采用误差补偿方式来对于系统的误差进行补偿。
MEMS惯性传感器的误差分析与补偿方法大致分为3种:第一种是采用误差补偿算法的方式进行补偿,即将误差通过算法拟合方式进行补偿;第二种是采用旋转调制技术,将IMU(惯性测量单元)加上转动机构进行旋转,通过旋转来消除常值误差(称为旋转调制);第三种是采用Allan方差分析法,以补偿系统的随机误差。
1 惯性传感器的温度误差补偿技术
温度所带来的惯性器件精度误差主要来自惯性器件本身对于温度的敏感程度以及温度梯度或者温度与温度梯度的交叉乘积项的影响。随着温度的变化,惯性器件的结构材料由于热胀冷缩会形成干扰力矩,因此需要对于惯性器件的温度特性进行研究,以获取温度对于惯性器件输出性能影响的规律,建立加速度计静态温度模型并且对因温度变化引起的误差进行补偿,是提高其精度的一种有效手段。
对陀螺仪及加速度计的静态温度模型进行拟合的方法一般采取最小二乘法,以此得到陀螺仪和加速度计的数学模型系数与温度的关系并建立静态温度误差补偿模型,从而提高器件精度。国内多家陀螺仪及加速度计生产单位均对温度误差补偿进行研究,使之较补偿前的产品静态误差减小了一个数量级。
2 惯性传感器常值漂移误差的旋转调制技术
旋转调制技术起初应用于静电陀螺系统,通过壳体旋转来自动补偿漂移误差力矩。自激光陀螺面世以来,美国迅速开展了旋转式惯性导航系统的研究,1968年,有学者首次提出通过旋转IMU的方式来对惯性传感器的漂移误差进行补偿。20世纪70年代,罗克韦尔公司研制了静电陀螺检测器,壳体采用了旋转技术,使得与其配套的舰船系统具备长时间的精度性能。20世纪80年代,Sperry公司研制了单轴旋转惯性导航系统,采用了经典的单轴四位置正反转停方案,直到现在该方案仍被广泛应用。1989年,北约船用标准惯性导航系统即MK49型双轴旋转式激光陀螺惯性导航系统,在潜艇以及水面舰艇上进行装备。在国内国防科技大学首先开始旋转调制技术在光学陀螺上的应用。如今旋转调制技术在MEMS上主要采用单轴旋转方案,双轴旋转方案由于旋转机构复杂等原因相对应用较少。
由于旋转的需要,导航系统采取捷联算法,从原理上来讲,MEMS惯性导航系统旋转调制可以有效抵消系统常值误差,系统的误差传播方程如下:
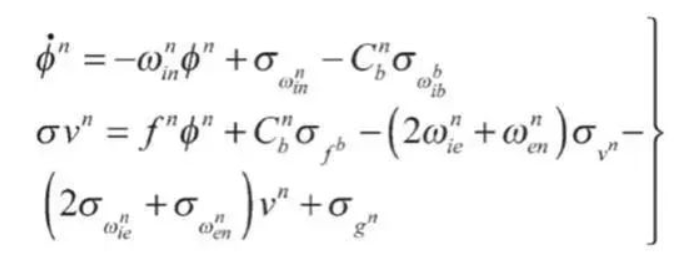
在式(1)中,由于陀螺仪以及加速度计自身测量误差所带来的系统误差为σωbib和σfb,因此式中的Cnbσωbib以及Cnbσfb两项误差是由于测量误差引入的,故误差补偿主要补偿这两项误差。由于以上两项均包含Cnb,周期性地改变Cnb值即可消除这两项误差,故在惯性导航系统上施加旋转装置,将周期性误差通过旋转抵消,这就是旋转调制技术提高惯性导航系统精度的原理。
旋转调制方案需要确定旋转轴个数(单轴、双轴或多轴)、旋转速率、旋转角加速度、转停时间及停止位置数等参数。静基座及动基座下转停方案的不同会对旋转调制效果产生影响。
3 惯性传感器随机误差的Allan方差分析
目前常用的随机误差建模方法有时间序列分析法、Allan方差法及功率谱密度分析法。
由于惯性导航的误差方程推导都是建立在误差为白噪声的基础上,而在现实中,MEMS惯性器件的输出数据包含的各种噪声都会对系统产生干扰,导致计算结果中出现随机误差。陀螺输出值的误差中的随机噪声需要建模来补偿,而Allan方差分析法则是目前随机噪声分析中应用最普遍、最广泛的方法之一。MEMS器件中随机误差主要分为角度随机游走、加速度随机游走、量化噪声及零偏稳定性等。
相关产品




